團(tuán)隊(duì)負(fù)責(zé)人:
潘海鴻 教授/博導(dǎo)���,2007年華中科技大學(xué)博士畢業(yè)���。中國(guó)人工智能學(xué)會(huì)高級(jí)會(huì)員��;廣西機(jī)械工程學(xué)會(huì)會(huì)員�;廣西人工智能學(xué)會(huì)常務(wù)理事�����。近五年���,先后主持項(xiàng)目10項(xiàng)、參與項(xiàng)目9項(xiàng)��,其中:國(guó)家級(jí)項(xiàng)目4項(xiàng)(主持完成2項(xiàng))����,省部級(jí)項(xiàng)目9項(xiàng)(主持完成4項(xiàng)、主持在研1項(xiàng))����,橫向項(xiàng)目2項(xiàng)(主持完成1項(xiàng)����、主持在研1項(xiàng))�。目前正在主持由廣西大學(xué)為牽頭單位的創(chuàng)新驅(qū)動(dòng)發(fā)展重大專(zhuān)項(xiàng)“多關(guān)節(jié)工業(yè)機(jī)器人核心關(guān)鍵技術(shù)研發(fā)及產(chǎn)業(yè)化”,總經(jīng)費(fèi)為1800萬(wàn)元����,2018年到校經(jīng)費(fèi)900萬(wàn)元。近五年�,以第一作者或通信作者公開(kāi)發(fā)表學(xué)術(shù)論文20多篇,其中在國(guó)際權(quán)威刊物上發(fā)表本學(xué)科領(lǐng)域SCI一區(qū)論文4篇����,SCI二區(qū)論文3篇、SCI四區(qū)或EI收錄論文9篇�����,獲得24件授權(quán)發(fā)明專(zhuān)利��,11件軟件著作權(quán)登記��。在新能源動(dòng)力電池管理系統(tǒng)基礎(chǔ)研究��、機(jī)器人智能控制技術(shù)的應(yīng)用基礎(chǔ)研究有一定深度和廣度,并形成系列論文����,具有較高的學(xué)術(shù)水平。獲廣西區(qū)科學(xué)技術(shù)進(jìn)步獎(jiǎng)�,二等獎(jiǎng)、三等獎(jiǎng)各1項(xiàng)����,南寧市科學(xué)技術(shù)進(jìn)步獎(jiǎng),二等獎(jiǎng)1項(xiàng)����。
主要成員:
廖小平 教授/博導(dǎo)、陳琳 教授/博導(dǎo)���、李俚 教授/碩導(dǎo)、蒲明輝 教授/碩導(dǎo)�、林勇傳 副教授/碩導(dǎo)、馬俊燕 副教授/碩導(dǎo)�����。
團(tuán)隊(duì)聯(lián)系人:潘海鴻
聯(lián)系人電話:15877131653
聯(lián)系人郵箱:panhhgxu@gxu.edu.cn
主要研究方向
智能制造研究團(tuán)隊(duì)以中國(guó)制造“2025”關(guān)鍵核心科學(xué)技術(shù)為主線����,以制造過(guò)程關(guān)鍵技術(shù)���、智能裝備及智能機(jī)器人和新能源動(dòng)力電池智能管理系統(tǒng)為主攻方向。
?智能制造過(guò)程及關(guān)鍵技術(shù)研究��。主要包括:基于模型的產(chǎn)品設(shè)計(jì)���、虛擬樣機(jī)�、工藝規(guī)劃���、金屬材料及機(jī)械加工過(guò)程�����、產(chǎn)品裝配過(guò)程��、產(chǎn)品制造過(guò)程質(zhì)量預(yù)測(cè)和預(yù)控等智能制造關(guān)鍵技術(shù)研究���;
?智能裝備及智能機(jī)器人研究。主要包括:人工智能及邊緣計(jì)算�����、智能工業(yè)機(jī)器人技術(shù)、智能及人機(jī)融合的康復(fù)訓(xùn)練機(jī)器人�、交流伺服電機(jī)控制技術(shù)、嵌入式系統(tǒng)�����、復(fù)雜多軸伺服運(yùn)動(dòng)控制原理�����、3D機(jī)器視覺(jué)技術(shù)���、多維力矩傳感器技術(shù)�、機(jī)器人集成應(yīng)用����、5G與機(jī)器人技術(shù)融合的前瞻研究;
?新能源動(dòng)力電池智能管理系統(tǒng)研究方向�����。主要包括:石墨烯鋰離子電池的剩余電量和荷電狀態(tài)(SOC)�����、功率狀態(tài)(SOP)和健康狀態(tài)(SOH)的智能在線估計(jì)�����。
?超高精密大尺寸非球鏡面加工及檢測(cè)方法基礎(chǔ)研究�����。主要包括:(1)以噴射拋光為主要精密加工方法�����,探索不同工況下噴射液體成份及濃度�����、噴射壓力�、噴射速度、入射角度���、噴嘴形狀及尺寸大小����、噴嘴與被加工對(duì)象之間的距離��,在噴嘴與被加工平面鏡面(目前大小為100毫米)相對(duì)靜止情況下材料切除率的變化規(guī)律;(2)研究被加工鏡面的納米級(jí)運(yùn)動(dòng)定位精度的控制方法��、運(yùn)動(dòng)精度補(bǔ)償算法及實(shí)施方案�����;(3)研究超高精密鏡面的檢測(cè)方法及實(shí)現(xiàn)��。(檢測(cè)PV值達(dá)到或超過(guò) 波長(zhǎng)/40����,激光波長(zhǎng)是632.8納米,目標(biāo)是波長(zhǎng)/100���,大約是6納米)�。
主要研究項(xiàng)目
1�����、國(guó)家自然科學(xué)基金�,批量化精密加工過(guò)程質(zhì)量保持時(shí)序預(yù)控模型研究,2017/01-2020/12����;(在研)
2、國(guó)家自然科學(xué)基金�����,非正交多軸機(jī)電伺服系統(tǒng)空間輪廓誤差形成機(jī)理及控制策略�����,2015.01-2018.12��;(結(jié)題)
3���、國(guó)家自然科學(xué)基金�,多變量融合多維度的車(chē)用動(dòng)力電池剩余壽命在線預(yù)測(cè)����,2017/01-2020/12;(在研)
4��、廣西創(chuàng)新驅(qū)動(dòng)發(fā)展重大專(zhuān)項(xiàng)�,多關(guān)節(jié)工業(yè)機(jī)器人核心關(guān)鍵技術(shù)研發(fā)及產(chǎn)業(yè)化,2018.03-2021.02����;(在研)
5����、廣西創(chuàng)新驅(qū)動(dòng)發(fā)展重大專(zhuān)項(xiàng)��,人機(jī)共融的多位姿下肢康復(fù)訓(xùn)練機(jī)器人研究及產(chǎn)業(yè)化�,2017.9-2020.8;(在研)
6�����、廣西重點(diǎn)研發(fā)計(jì)劃�����,基于“互聯(lián)網(wǎng)+”的腿部驅(qū)動(dòng)型全體位步態(tài)訓(xùn)練機(jī)器人工作站���,2017.1-2019.12����;(在研)
7�、南寧市重點(diǎn)研發(fā)計(jì)劃,3D模型驅(qū)動(dòng)的機(jī)器人在線智能編程系統(tǒng)研發(fā)及應(yīng)用�����,2018.01-2019.12;(在研)
8���、南寧市重點(diǎn)研發(fā)計(jì)劃,具有3D視覺(jué)的工業(yè)機(jī)器人控制系統(tǒng)關(guān)鍵技術(shù)研發(fā)�,2018.01-2019.12。(在研)
科研條件
數(shù)控加工中心3臺(tái)套���;三坐標(biāo)測(cè)量?jī)x1臺(tái)����;機(jī)器人工作站10臺(tái)套����;機(jī)器視覺(jué)實(shí)驗(yàn)平臺(tái)6套;運(yùn)動(dòng)控制器及實(shí)驗(yàn)平臺(tái)5臺(tái)套����;DSP\FPGA嵌入式實(shí)驗(yàn)平臺(tái)6臺(tái)套;具有主動(dòng)靶標(biāo)的激光跟蹤儀(API����,美國(guó))1套;辨識(shí)機(jī)械電氣系統(tǒng)傳遞函數(shù)的動(dòng)態(tài)信號(hào)分析儀(DSA)1套���。此外�����,還有安捷倫示波器���、泰克示波器�����、多通道信號(hào)采集處理系統(tǒng)等儀器����。
部分科研成果
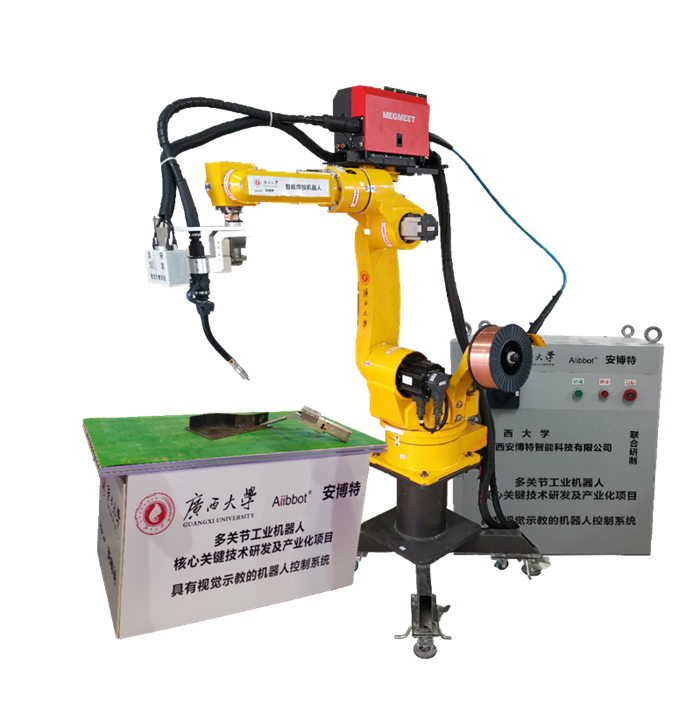
圖1基于雙目視覺(jué)示教的智能焊接機(jī)器人�����,獲得2019年全國(guó)創(chuàng)新創(chuàng)業(yè)大賽優(yōu)勝獎(jiǎng)

圖2自主研發(fā)的多軸實(shí)時(shí)工業(yè)以太網(wǎng)運(yùn)動(dòng)控制系統(tǒng)

圖3與上市公司深圳萬(wàn)訊自控有限公司合作設(shè)計(jì)的發(fā)動(dòng)機(jī)曲軸自動(dòng)上下料流水線(a)

圖4與上市公司深圳萬(wàn)訊自控有限公司合作設(shè)計(jì)的發(fā)動(dòng)機(jī)曲軸自動(dòng)上下料流水線(b)


